Dynamic Error Compensation
Mechanical accuracy compensation to eliminate system imperfections
Read More

Capabilities
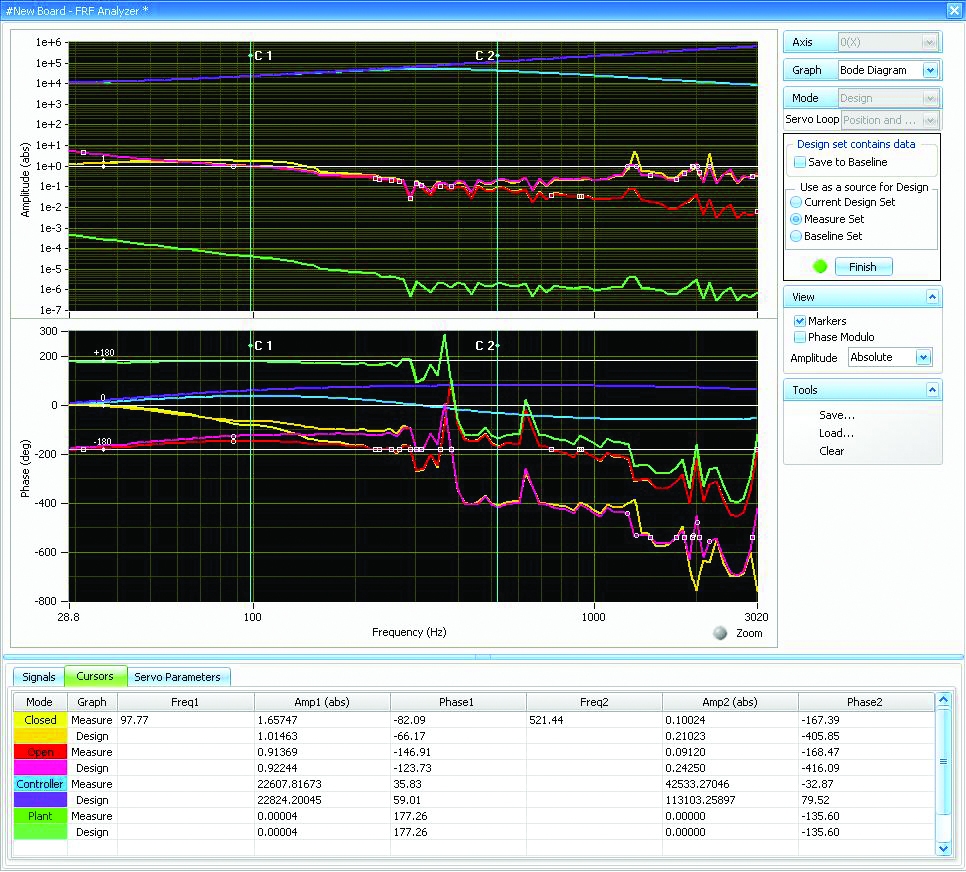
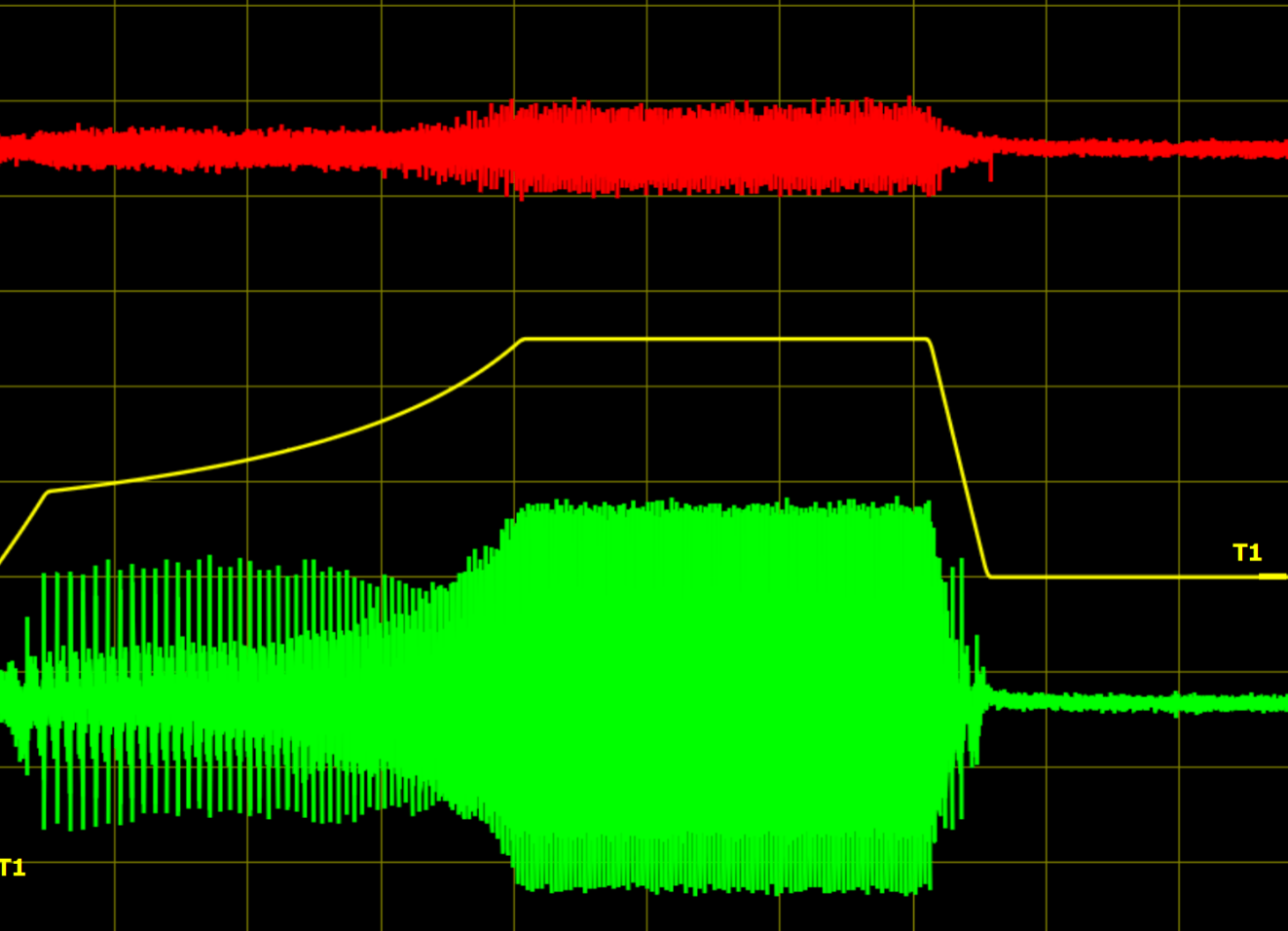
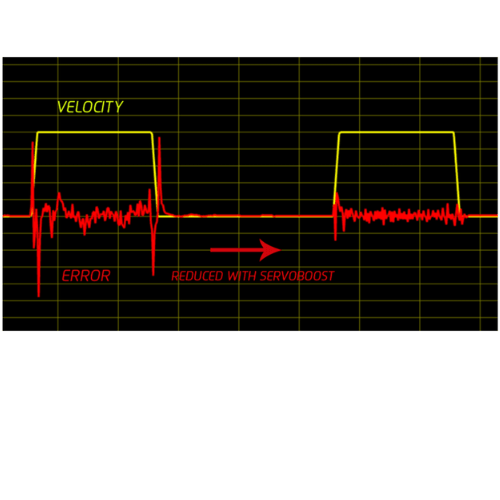
Servo control algorithms are fundamental to achieving high levels of performance with precision motion systems. They govern how closed loop motion systems respond to commands and disturbances, directly impacting machine accuracy and throughput. Advanced control algorithms from ACS can significantly increase servo control loop bandwidth, stability, and disturbance rejection, resulting in faster move and settle, lower jitter, and higher tolerance for variations in load and operating conditions.